

















易安网通行证登录
已经在易安网注册的用户请直接登录
快捷登陆:

没有易安网通行证?
调试与校准的正常顺序
① 设置正确的吊机参数(工况号)和主副卷扬的绳数;
② 进去校准模式(需要一个7位的密码)
选择“service edit”并输入密码:
如果不能确定正确的密码,那么通过选择“operator screen”正常显示模式,按菜单键“menu”选择“system function”然后“system information”上会显示5位软件编号,这5位数字和当前的两位时间的小时数构成的就是系统的PIN码;
③ 设置当前日期和时间,通过“system function”子菜单;
④ 设置所有传感器的输出形式和增益(1,2,3mV或4~20mA),如果是4~20mA,确认主机的跳线是否正确;
⑤ 设置各个卷扬极限数值,如单绳拉力和最大使用绳数;
⑥ 设置信号平均采样值。(No. of samples);
⑦ 设置吊钩的起始提升负载数值;(建议输入两倍吊钩的重量)
⑧ 设置装置模式负载的数值,(建议输入两倍吊钩的重量,避免在臂杆起升或下降离开地面装置模式报警);
⑨ 设置装置模式长度,(建议输入最长的臂杆的长度,避免在臂杆起升或下降离开地面装置模式报警);
⑩ 设置力矩报警百分比数值,(正常设置为85,100和102%);
11 设置数据下载记录点或者保留默认数值;
12 检验主臂和副臂角度传感器的信号在全部工作范围内满足初始信号在33~980之间;
13 检验主臂负载传感器和副臂负载传感器的信号在全部工作范围内满足初始信号在33~980之间;
14 检查V防后倾撑杆油压传感器的信号在全部工作范围内满足初始信号在33~980之间;
15 确认所有的数字输入信号已经依照图纸正确的连接;
16 确认所有的数字输出信号(开关量)已依照图纸正确的连接;
17 确认吊机的所有几何数据的正确性;
18 校准所有的角度传感器的高/低点,不同的传感器在不同的工况配置下才被激活使用;
19 校准每一个负载传感器的高/低点,不同的传感器在不同的工况配置下才被激活使用;
20 校准主臂工况每一个吊钩的实际力矩;
21 校准变幅副臂工况每一个吊钩的实际力矩;
22 如果校准的重量在全幅度内显示准确的话,而其他测试重量显示存在比例性误差,则有必要使用比例偏差补偿scaling(百分比%)的功能,通过“load moment scaling”通道调整主臂或者副臂传感器的比例。这需要经过技术培训的专业人员操作。
23 使用臂杆防后倾支撑补偿功能“boom backstop compensation”通过补偿“correction”的通道。(若有必要);
24 建议记录下所有做过的调试的数据,使用Cal-table 通道可以查看到所有的信息;
25 进行调试数据备份“backup cal table”通过service edit / memory options”通道;
26 下载力矩调试的数据到一台笔记本电脑,需要使用一颗Robway连接线通过超级终端程序。
下面就以上校准角度传感器和校准负载传感器做详细介绍。
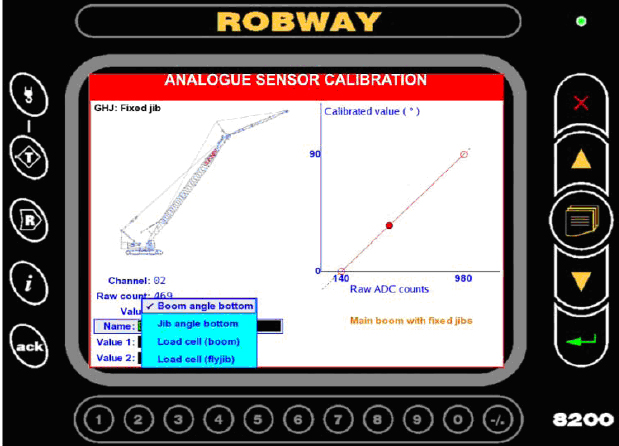
校准角度传感器
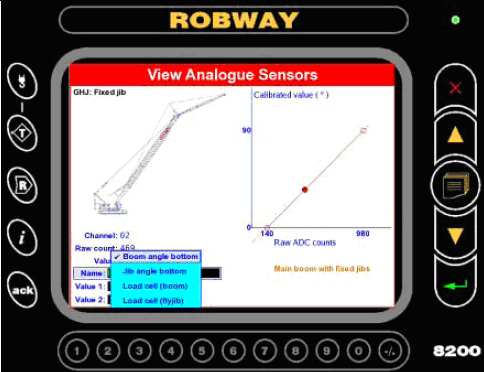
从下拉菜单中选择需要校准的角度传感器,首先确认这个传感器是当前工况需要使用的,否则是不能被激活的。
当前工况下的所有角度传感器都要校准(有可能每个臂上有两个角度传感器),最好的办法是通过角度测量仪对各个角度传感器进行标定。初始数据必须在32到980之间。
注意:
有可能有些角度传感器的工作范围在负角度和正角度之间;
每个角度传感器需要两个标定(高角度和低角度)
尽可能地让标定的高低两点离得远一些以取得更好的精度。
校准负载传感器
从下拉菜单中选择需要校准的角度传感器,首先确认这个传感器是当前工况需要使用的,否则是不能被激活的。
请注意:可能需要使用一个负载模拟器(mV /V或4~20mA)来帮助完成这个工作。最好的方法是先标定零点然后标定满量程点,初始数据始终在32和大约980之间),当前工况下所有使用的负载传感器都要校准。若需要标定剩余的负载传感器则需要改变不同的工况。
每个负载传感器需要两个标定(零吨位点和最大吨位点),使用一个模拟器完成这个标定是最好的方法。
比如,4~20mA模拟器连接到传感器接入点,传感器的吨位比如60t,首先模拟器先设置为0.0mA,确认初始信号大约为50左右,然后标定为0.0t。
将模拟信号设置为20.0mA,确定初始信号大约为980左右,然后标定为传感器的额定值。
校准力矩和负载
负载力矩的校准是一个不需要测试砝码的简单过程,在准备校准之前,请先确认一下的工作已经完成:
① 选择正确的工况、绳数以及当前的卷扬;
② 所有的装置检查使用的正确性。特别重要的是:起重机的几何参数必须是准确的(请参考软件资料里面的数值和实际是否相符);
③ 所有使用的角度传感器必须已经正确的校准过,包括主臂和副臂的以及超起桅杆的。(见上面的校准方法);
④ 确认已安装的主臂负载传感器和副臂负载传感器已经正确地校准好增益。(见上面的校准方法);
⑤ 还需要检查角度传感器和负载传感器的读数稳定性,如果数值是有规律地在一定范围内变化,则可以通过“number of samples to average”功能将采样的数值增加,直到达到满意的稳定效果。如果增加到8仍然得不到好的结果,则需要检查并确认安装是否存在问题、以及电缆接头是否进水和有潮气、电缆是否有破损等故障。
注意:
只有在动态非常大的吊机上才将这个数值设为大于8的值;
准确的砝码是验证校准精度的标准,理想的砝码重量接近最大的安全起升能力,这样可以验证全量程的精度。
校准主臂力矩和负载
两个点(一个低角度点和一个高角度点)的负载传感器自学习(感受力矩负载)是必需的,吊钩下不必有额外的负载就可以进行校准。确认当前当前使用和选择的工况是主臂工况,并且正确的选择吊钩和倍率,每个在使用的吊钩都要分别校准。
特别注意:传感器的标定和力矩的校准不能够在臂杆接触到防后倾液压撑杆的情况下完成,如果防后倾液压撑杆是安装上的吊车,那么首先需要确认液压传感器是安装到ROBWAY系统里,并已经标定好压力值(0到600bar)。如果没有安装或者标定那么负载的校准可能无法取得满意的效果和精度。
注意:假定一下工作程序已经在准备校准负载之前都已经完成,如果未完成则可能无法准确进行负载的校准。
① 所有安装的负载传感器已经完成标定和验证;
② 确定已正确设置好主臂负载传感器的输出增益形式(1,2或3mV或4~20mA),并完成传感器高低能力点的标定;
③ 确定选择了当前的工作卷扬,否则需要通过绞车选择键来进行正确的设置,如果当前的工况没有配置其他绞车,则无法选择设置其他不存在的卷扬。
步骤:
将吊钩安全地放在接近吊臂头部的位置
1) 通过菜单选择“operator function”然后选择“learn boom force”,输入吊钩的实际重量在“load”窗口里。使用删除键清楚旧的数据然后输入新的数值;
2) 安全地将臂杆缓慢降低到接近最大半径的位置(低角度),然后选择到“store point”窗口,靠近“store point”窗口上方有一个信息显示为“position 1”,等待吊臂短暂的时间待其平稳下来后按下“ACK”键,此时这个“store point”信息会改变为“position 2”;
3) 安全地将臂杆慢慢的上升到高角度的位置(在接近接触到防后倾撑杆之前停止),待臂杆停稳后再按下“ACK”键。这个“store point”信息又会改变回“position 1”。此时系统需要一段时间的运算和存储数据,大约会持续一分钟的时间,这期间任何操作都会被冻结;
4) 回到正常的工作界面,检验调试的数据,在允许幅度范围内增幅/减幅检验吊钩重量是否准确。如果吊钩重量显示偏差过大,那么重复上面的调试。
5) 吊钩检验正常的话,需要测试砝码来检验负载,安全地提升允许的载荷并作适当的变幅动作。检验显示的负载重量是否满足要求。
请注意:如果校准后负载的显示精度不能满足使用要求,那么需要确认所有的吊机几何参数是正确的,并且确认传感器的安装没有问题。显示重的负载和实际偏差过大,而大吊钩的重量显示又满足要求,那么需要对“对scaling”进行设置。
校准副臂力矩和负载
两个点(一个低角度点和一个高角度点)的负载传感器自学习(感受力矩负载)是必需的,吊钩下不必有额外的负载就可以进行校准。确认当前当前使用和选择的工况是主臂工况,并且正确的选择吊钩和倍率,每个在使用的吊钩都要分别校准。
特别注意:传感器的标定和力矩的校准不能够在臂杆接触到防后倾液压撑杆的情况下完成,如果防后倾液压撑杆是安装上的吊车,那么首先需要确认液压传感器是安装到ROBWAY系统里,并已经标定好压力值(0到600bar)。如果没有安装或者标定那么负载的校准可能无法取得满意的效果和精度。
注意:假定一下工作程序已经在准备校准负载之前都已经完成,如果未完成则可能无法准确进行负载的校准。
④ 所有安装的负载传感器已经完成标定和验证;
⑤ 确定已正确设置好主臂负载传感器的输出增益形式(1,2或3mV或4~20mA),并完成传感器高低能力点的标定;
⑥ 确定选择了当前的工作卷扬,否则需要通过绞车选择键来进行正确的设置,如果当前的工况没有配置其他绞车,则无法选择设置其他不存在的卷扬。
步骤:
将吊钩安全地放在接近吊臂头部的位置
6) 通过菜单选择“operator function”然后选择“learn boom force”,输入吊钩的实际重量在“load”窗口里。使用删除键清楚旧的数据然后输入新的数值;
7) 安全地将臂杆缓慢降低到接近最大半径的位置(低角度),然后选择到“store point”窗口,靠近“store point”窗口上方有一个信息显示为“position 1”,等待吊臂短暂的时间待其平稳下来后按下“ACK”键,此时这个“store point”信息会改变为“position 2”;
8) 安全地将臂杆慢慢的上升到高角度的位置(在接近接触到防后倾撑杆之前停止),待臂杆停稳后再按下“ACK”键。这个“store point”信息又会改变回“position 1”。此时系统需要一段时间的运算和存储数据,大约会持续一分钟的时间,这期间任何操作都会被冻结;
9) 回到正常的工作界面,检验调试的数据,在允许幅度范围内增幅/减幅检验吊钩重量是否准确。如果吊钩重量显示偏差过大,那么重复上面的调试。
10) 吊钩检验正常的话,需要测试砝码来检验负载,安全地提升允许的载荷并作适当的变幅动作。检验显示的负载重量是否满足要求。
请注意:如果校准后负载的显示精度不能满足使用要求,那么需要确认所有的吊机几何参数是正确的,并且确认传感器的安装没有问题。显示重的负载和实际偏差过大,而大吊钩的重量显示又满足要求,那么需要对“对scaling”进行设置。
分享按钮责任编辑 :小洋葱 (易 安 网 版 权 所 有 ,未 经 授 权 禁 止 使 用 ,不 能 转 载 ! )
易安网欢迎相关题材的投稿,所有原创稿件版权均归所有人所有。在征得所有人许可的前提下,本站有以下权利:修改、改编、出版、翻译、据以创作衍生作品、传播、表演和展示此等内容的全部或部分,和将此等内容的全部或部分编入其他任何形式的作品、媒体或技术中,欢迎更多形式的版权合作。
您可以订阅《易讯通》,您会通过邮箱收到易安网最新精彩内容。
2013 ©易安网. ALL Rights Reserved. 京ICP备11028188号 | 京公网安备11010502022994